Structural mobility modeling for trajectory, network, and transportation systems.
I study how large-scale mobility trajectories can be used to reveal the latent structure of human movement across spatial, network, and transportation systems. My research develops structural representations and computational frameworks that transform noisy trajectory observations into interpretable models for understanding mobility behavior and systems.

NovaMatch
Research EcosystemNovaMatch is a unified trajectory processing ecosystem that integrating map matching, cross-network translation, structural representation, and mobility analytics. It transforms raw mobility observations into knowledge that supports transportation systems research, planning, policy and other downstream task.
Explore NovaMatch Framework →Current Research
Featured work
Transit Mirage
Research PaperShifting Transit Deserts and Transit Mirages: Rethinking the Interpretation of Transit Demand-Supply Imbalance
Transportation Research Part A · 2026 · Revision · AGU25 / TRB2026 Oral Presentation
High demand–supply imbalance does not necessarily indicate structural transit disadvantage.
PM-Tree
Algorithm Research PaperHow Much of a Trajectory Is Needed? PM-Tree: Priority-Guided Hierarchical Trajectory Representation
IEEE Transactions on Intelligent Transportation Systems · 2026 · Under Review
Only 3% of trajectory observations can preserve over 96% of structural information.
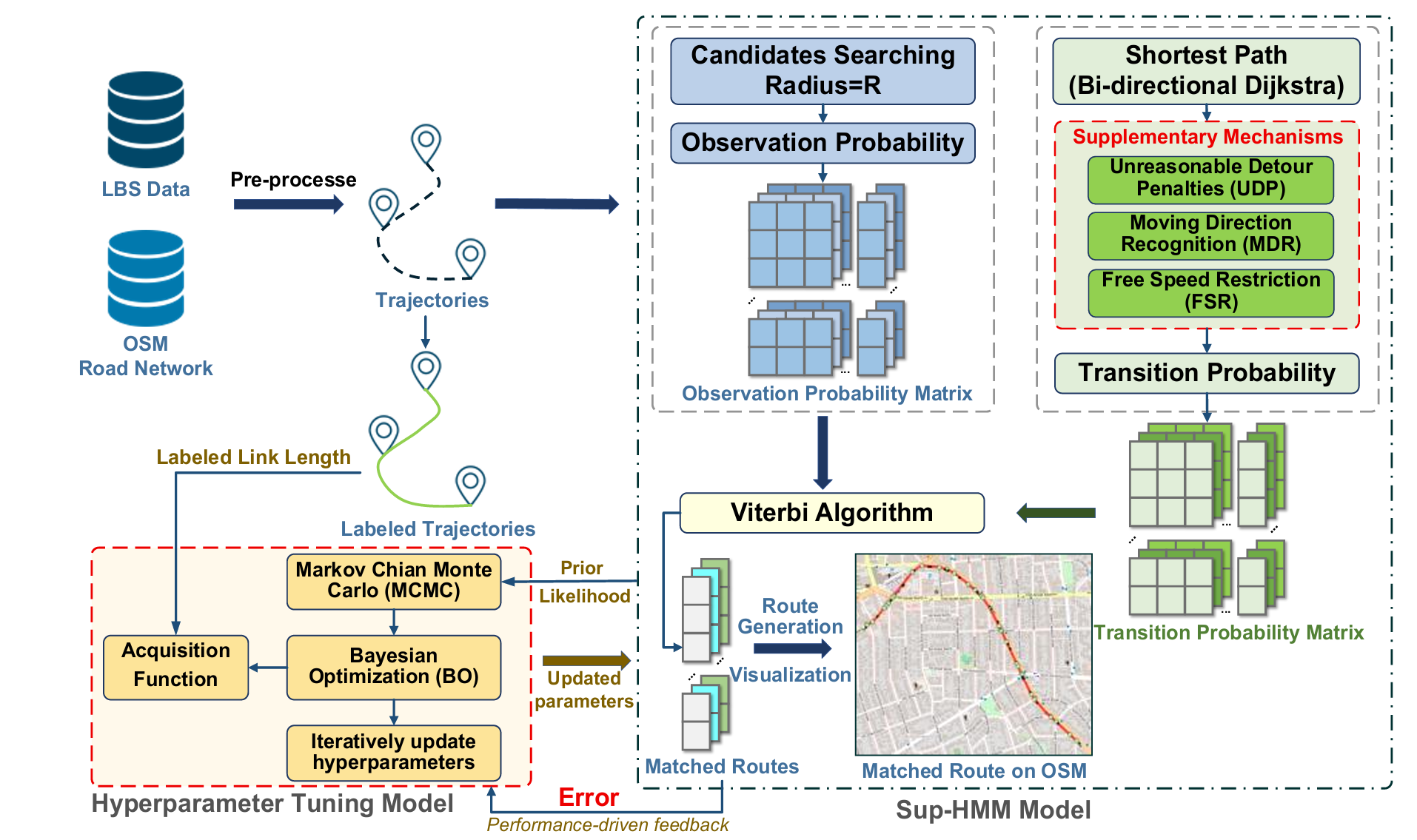
Sup-HMM
Algorithm Research PaperTaming Volatile Trajectories: Sup-HMM, a Bayesian-Optimized Hidden Markov Model for Map Matching of Location-Based Service Data
IEEE Transactions on Intelligent Transportation Systems · 2025 · Revision
Bayesian optimization improves map matching under extremely sparse trajectories.
News
Latest update · 07/2026Earlier News
- 09/2025: My paper Rethinking Transit Deserts: Identifying Pseudo and Real Gaps through Trip-Level Mobility Data has been accepted by TRB. Another paper, Complete Trip: An Open and Privacy-Safe Dataset of Multimodal Travel Sequences for Urban Transportation Systems Analysis, has also been accepted.
- 08/2025: After the TRB deadline, I have been busy cleaning up my LBS map-matching code. Formatting code so that other humans can understand it feels like the hardest optimization problem ever.
- 09/2024: The Computer Software Copyright Registration in China: Vision-Based Lane Detection System With Self-supervised Pre-training Through Masked Sequential Auto-encoders (VLD_SP-MSAE), granted on Sep. 11, 2024, Patent number 2024R11L1180902. We also published the open-source lane detection code on GitHub.
- 09/2024: I presented my recent work, Sup-HMM Map-Matching of Location Data Trajectories: A Heterogeneous and Bayesian-Optimized Hidden Markov Approach, at the TRC-30 conference in Crete.
- 07/2024: My paper have been submitted and is currently under review by The Transportation Research Board (TRB) 104nd Annual Meeting: Sup-HMM Map-Matching of Location Data Trajectories: A Heterogeneous and Bayesian-Optimized Hidden Markov Approach. Working on the map-matching continues. This work is part of our team's Complete Trips Project.
- 06/2024: My paper has been accepted by Conference in Emerging Technologies in Transportation Systems (TRC-30): Map Matching of Location Data Trajectories: A Heterogeneous and Bayesian-Optimized Hidden Markov Approach. Very excited for the presentation in Crete, Greece, in September!
- 06/2024: The computer software has been submitted and is currently under review by Computer Software Copyright Registration in China: Lane Line Detection Software Based on Image Sequence Mask Pre-Training.
- 04/2024: My paper has been submitted and is currently under review by Conference in Emerging Technologies in Transportation Systems (TRC-30): Map Matching of Location Data Trajectories: A Heterogeneous and Bayesian-Optimized Hidden Markov Approach. I'm currently working on map matching for human mobility data.
- 10/2023: Two of my TRB papers were accepted:
- A Novel Highway Traffic Capacity Analyzing Method under Road Region Atmospheric Environment Constraints Based on Computational Fluid Dynamics Model. The Transportation Research Board (TRB) 103rd Annual Meeting. 2023. [Accepted] Rank 1st.
- Intelligent Anomaly Detection for Lane Rendering Using Transformer with Self-Supervised Pre-Training and Customized Fine-Tuning. The Transportation Research Board (TRB) 103rd Annual Meeting. 2023. [Accepted] Rank 3rd.
- 09/2023: The article, "The Highway Region Boundary Based on Multi-Environmental Factors," can now be accessed. View the article here.
- 09/2023: Starting my Ph.D. studies at Villanova University!
- 08/2023: The article, "Robust Lane Detection Through Self Pre-Training With Masked Sequential Autoencoders and Fine-Tuning With Customized PolyLoss," has been finalized and posted in the "Early Access" area on IEEE Xplore. View the article here.
- 07/2023: I received my Ph.D. offer from Villanova University! Looking forward to new research and life at Villanova!
- 07/2023: My paper Robust Lane Detection through Self Pre-training with Masked Sequential Autoencoders and Fine-tuning with Customized PolyLoss is accepted by the journal of IEEE Transactions on Intelligent Transportation Systems.
- 06/2023: I received my M.Eng. degree in traffic and transportation from Lanzhou Jiaotong University!